港口自动驾驶中激光雷达SLAM与视觉SLAM融合技术应用研究
港口自动驾驶是一项复杂的系统工程,需要攻关和突破的关键技术众多,精准的导航与定位技术是核心关键技术之一,此技术是实现对实地物理环境数字化构造,也是实现自动驾驶精确感知和驾驶决策的前提。
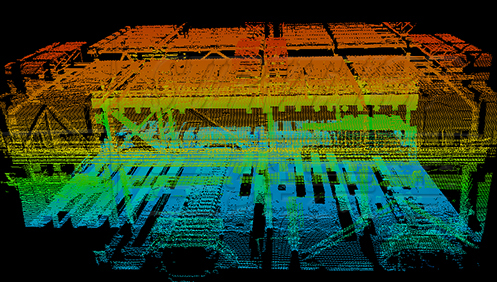
图:激光雷达SLAM
激光雷达SLAM
通过激光雷达实时构建环境地图并进行自我定位,适应复杂的港口环境。激光雷达SLAM技术是自动驾驶汽车开发的重要组成部分。该传感器发射激光脉冲并测量脉冲在击中路径中的物体后反弹所需的时间。通过分析返回的激光信号,激光雷达SLAM系统可以创建代表环境的详细3D点云,并使用此信息来估计集卡在地图内的位置和方向,帮助集卡的车载计算机自动导航。激光雷达SLAM可用于自动驾驶集卡的多种应用,包括障碍物检测和规避、定位和地图绘制。传感器检测并分类行驶路径中的障碍物,例如其他车辆、和道路危险。该信息用于规划安全有效的路线,避免潜在的碰撞。激光雷达SLAM帮助集卡的车载计算机在环境中准确定位,这对于规划最佳驾驶路径和避免碰撞至关重要。

图:视觉SLAM
视觉SLAM
结合摄像头和图像处理技术,实现对环境的识别和定位,增强系统的感知能力,能够在未知环境中实现自主导航和地图构建。该技术通过捕获连续图像帧,利用特征匹配算法估算相机的运动轨迹,并构建出周围环境的三维模型。视觉SLAM具有成本低、信息丰富等优点,适用于多种场景,包括室内外导航、增强现实和自动驾驶等。在港口自动驾驶领域,视觉SLAM的应用优势尤为明显。它能够与激光雷达等传感器融合,提高环境感知的精度和可靠性,从而实现高效的路径规划和障碍物避让。另外,视觉SLAM在动态环境中表现出色,能够实时识别和跟踪移动目标,如其他车辆和交通参与者,这对于复杂的港口作业至关重要。视觉SLAM技术的低成本特性使其更易于集成到现有的自动驾驶系统中,有助于推动港口自动化升级与智能化转型。
将激光SLAM和视觉SLAM的技术结合具有显著优势,可以有效提高定位精度和环境适应能力。激光SLAM提供高精度的距离测量,适合在静态环境中进行精准定位,而视觉SLAM利用丰富的图像纹理信息,能够在动态环境中有效跟踪物体。这种结合使得系统能够在各种光照和场景条件下保持高效的导航能力。视觉SLAM的回环检测能力可以有效减少累计误差,增强系统的鲁棒性,从而提升整体性能。另外,融合技术还带来了丰富的地图信息和成本效益。视觉SLAM生成的高密度环境信息与激光SLAM的精确测量相结合,使得最终生成的地图更加全面。
随着激光雷达价格的逐步降低,结合低成本摄像头的方案使得整体系统更加经济实惠。通过多传感器融合,这种灵活且高效的导航方案正在成为新趋势,为港口无人驾驶提供更为可靠的解决方案。
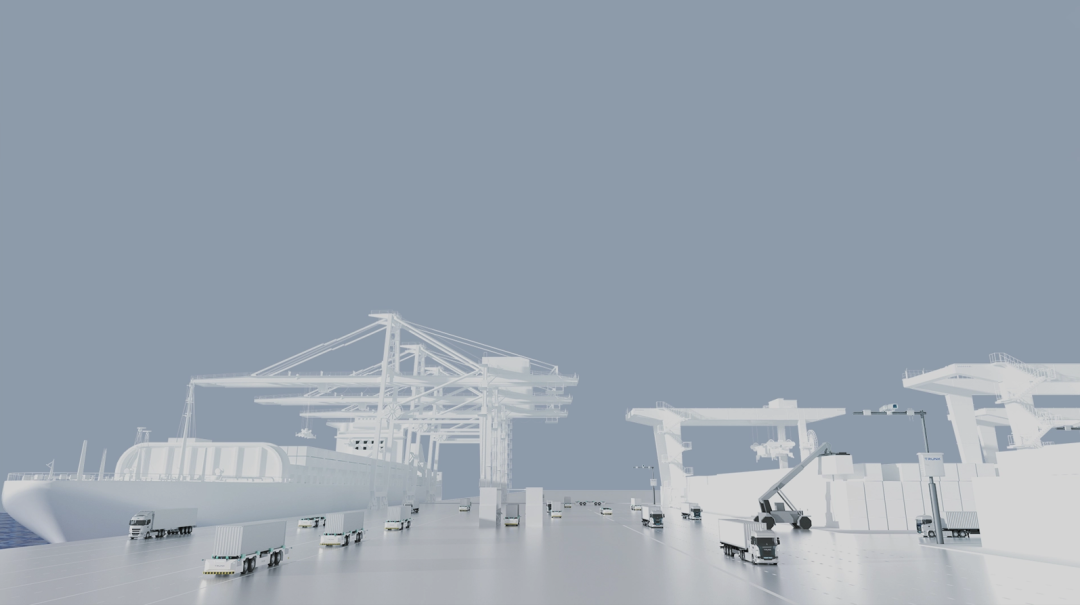
图:3SLAM结合图
以下是实现这两种技术整合的方法:
1.数据采集与预处理多传感器融合: 首先,使用激光雷达、双目摄像头和惯性测量单元(IMU)等传感器同时采集数据。激光雷达提供距离信息,而视觉传感器提供丰富的纹理和颜色信息。数据处理: 对传感器采集的数据进行预处理,包括去噪声、图像校正等,以确保后续处理的准确性。
2.独立建图激光SLAM建图: 将处理后的激光雷达数据输入激光SLAM算法,利用其高精度的距离测量生成2D栅格地图。视觉SLAM建图: 将双目摄像头捕获的图像和IMU数据输入视觉SLAM算法,生成三维稀疏点云图,并进行位姿估计。
3.地图转换与融合地图转换: 将视觉SLAM生成的三维稀疏点云图转换为2D栅格图,以便与激光SLAM生成的地图进行融合。这一过程可以通过投影和特征匹配来实现。栅格融合: 利用栅格占用法则将两种地图进行融合,形成一个综合的概率栅格地图。这种方法能够克服单一SLAM技术的缺陷,实现更高精度的定位和避障能力。
4.优化与回环检测非线性优化: 在融合后的地图中应用非线性优化算法(如因子图优化),提高整体地图的精度和鲁棒性。通过对位姿估计进行优化,可以有效减少累计误差。回环检测: 利用视觉SLAM中的回环检测能力,增强系统在复杂环境中的稳定性和准确性。这可以通过特征点匹配来实现,即使在前端累计误差情况下也能保持较高的定位精度。
5.实时应用与反馈实时数据处理: 确保系统能够实时处理来自不同传感器的数据,并动态更新地图。这需要高效的数据传输和处理架构,以支持快速响应变化的环境。反馈机制: 通过不断迭代更新位姿估计和地图信息,形成闭环反馈,提高系统在未知环境中的自主导航能力。
融合激光雷达SLAM与视觉SLAM不仅能提升环境感知能力,还能增强系统在复杂场景下的适应性,为港口无人驾驶集卡应用提供更为可靠的解决方案。